Инженеры Лаборатории реактивного движения NASA работают над созданием роя плавающих роботов размером с мобильный телефон, которые смогут пробираться сквозь толщу воды под ледяной оболочкой спутника Юпитера Европы или спутника Сатурна Энцелада в поисках признаков инопланетной жизни.
Эта концепция, получившая название Sensing With Independent Micro-Swimmers (SWIM), недавно получила финансирование в размере 600 000 долларов в рамках Фазы II программы NASA Innovative Advanced Concepts (NIAC). Эти мини-пловцы будут намного меньше, чем другие концепты планетарных роботов для исследования океана, что позволит компактно загрузить многих из них в ледовый зонд. Они дополнят научный потенциал зонда и смогут повысить вероятность обнаружения признаков жизни при оценке потенциальной обитаемости на далеком океаническом небесном теле.
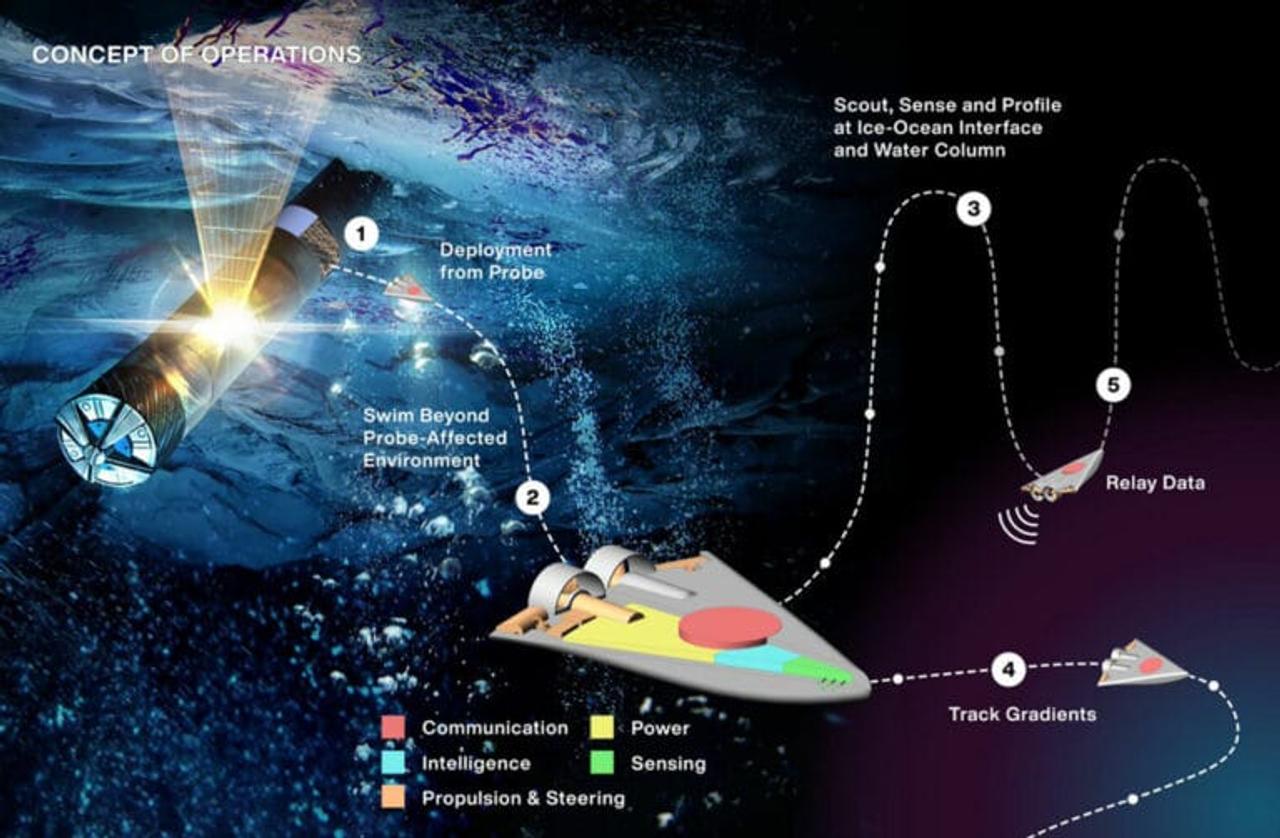
Концепция SWIM на ранней стадии предусматривает роботов клиновидной формы, каждый около 12 сантиметров в длину и от 60 до 75 кубических сантиметров в объеме. Около четырех десятков таких роботов могут поместиться в 10-сантиметровой секции криобота диаметром 25 сантиметров, занимая лишь около 15% выделенной полезной нагрузки.
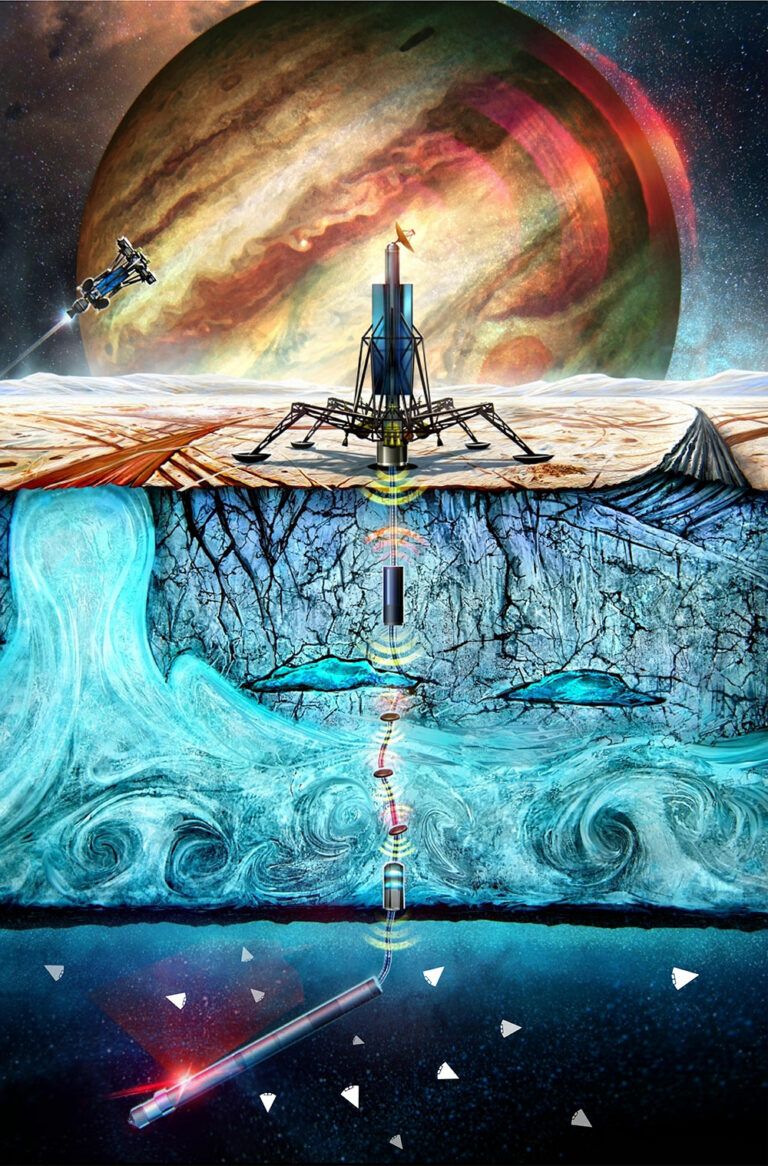
Роботы SWIM будут подключены через кабель связи к наземному посадочному модулю, который, в свою очередь, будет точкой контакта с диспетчерами миссии на Земле. SWIM также позволит собирать данные вдали от раскаленной ядерной батареи криобота на которую зонд будет опираться, чтобы растопить путь вниз сквозь лед. Оказавшись в океане, это тепло от батареи создаст тепловой пузырь, медленно растапливая лед наверху и потенциально вызывая реакции, которые могут изменить химический состав воды.
Каждый из этих роботов SWIM будет иметь собственную двигательную установку, бортовой компьютер и систему ультразвуковой связи, а также датчики температуры, солености, кислотности, давления и химических веществ для отслеживания биомаркеров — признаков жизни.
Роботы SWIM могут «сбиваться» вместе, тем самым уменьшая ошибки в данных из-за их перекрывающихся измерений. Эти групповые данные также могут показывать градиенты — например, температуру или соленость, увеличивающиеся на коллективных датчиках роя и указывающие на источник сигнала который они обнаруживают.
Сподобалася стаття! Підтримай проект BuildingTech!
Дякуємо всім за допомогу!
PrivatBank:
UAH - 4149 4993 7451 0947
USD - 4149 4993 7451 0988
EUR - 4149 4993 7451 1002