Радар и LiDAR были невероятно быстрыми и эффективными инструментами для картографирования и съемки поверхности Земли с самолетов и спутников, но, хотя они могут предоставлять точные показания через облака, они не могут показать вам, что находится под поверхностью моря.
Сонар остается наиболее эффективным способом картографирования морского дна, но подавляющее большинство океанов, которые составляют 70 % поверхности Земли, остаются не нанесенными на карту, потому что звуковые волны до сих пор могли быть отправлены только из-под воды.
Звуковые волны, посланные из воздуха в воду, теряют более 99,9 % своей энергии. Скудные оставшиеся 0,1 процента энергии действительно создают сигнал гидролокатора, но он теряет еще 99,9 процента своей энергии при возвращении из воды в воздух.
Гидролокатор обычно используется для обнаружения подводных лодок в основном с помощью устройств на днище кораблей. Но пока что наиболее близкими к бортовым гидролокаторам являются «ковшы» вроде системы FLASH компании Thales ; низкочастотные широкополосные гидролокаторы, которые свисают с кабелей с днища вертолетов и погружаются в море. Эти методы медленные, дорогие и не годятся для покрытия больших площадей.
Команда из Стэнфорда считает, что выяснила, как посылать и принимать сигналы гидролокатора с бортовых платформ, не касаясь воды, и эта разработка может в конечном итоге значительно упростить нанесение на карту морского дна и изучение морской жизни.
В то время как звуковые волны и электромагнитное излучение в равной степени достигают тупика на поверхности барьера воздух-вода, команда обнаружила, что фотоакустический подход может по крайней мере передать сигнал через барьер в одном направлении.
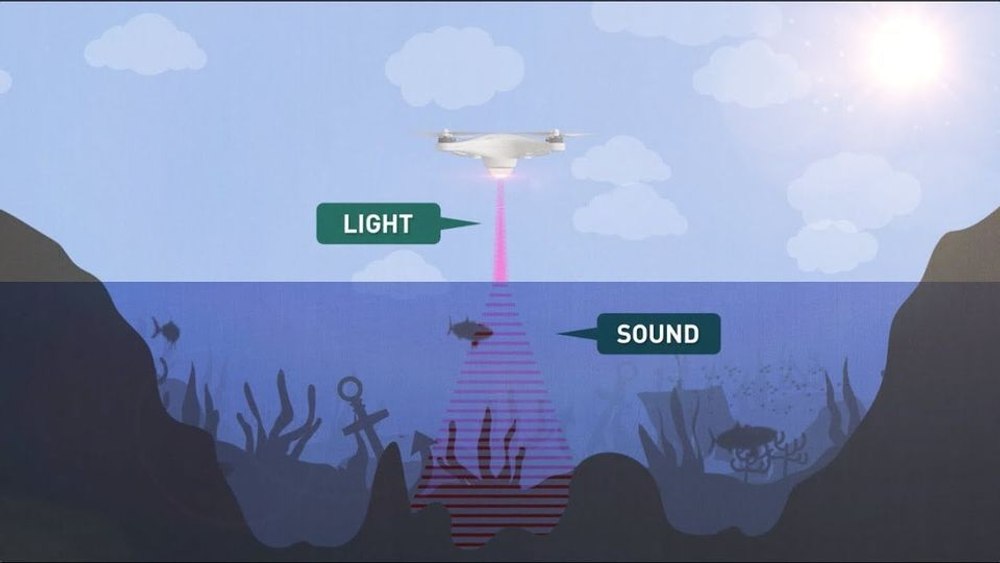
Фотоакустическая авиационная сонарная система, PASS, запускает лазер на поверхность воды, его интенсивность пульсирует до желаемой акустической частоты, и по мере поглощения этой лазерной энергии в воде создаются ультразвуковые волны, которые могут действовать как эффективные волны сонара, отскакивая от подводных объектов, прежде чем вернуться на поверхность.
При возвращении из воды в воздух эти звуковые волны истощают почти всю их энергию, но эта односторонняя потеря по-прежнему оставляет достаточно сигнала, чтобы его «услышали» преобразователи на бортовом устройстве.
«Мы разработали систему, которая достаточно чувствительна, чтобы компенсировать потерю такой величины, но при этом позволяет обнаруживать сигналы и получать изображения», - сказал руководитель исследования Амин Арбабиан.
После того, как сигнал был записан, он анализируется программным обеспечением для создания трехмерного изображения погруженного объекта. Программное обеспечение может корректировать преломление звуковых волн, когда они выходят из воды в воздух.
На данный момент команда протестировала прототип устройства PASS в небольшом масштабе, удерживая его над баком наполненным водой, чтобы получить трехмерное изображение металла погруженного под воду.