Робот-исследователь GLIMPSE, созданный в ETH Zurich и Цюрихском университете, одобрен для разведки ресурсов в космосе. Долгосрочная цель состоит в том, чтобы робот исследовал южную полярную область Луны.
Считается, что южный полярный район Луны содержит много ресурсов, которые могут быть полезны для операций лунной базы, таких как металлы, вода в форме льда и кислород, хранящийся в горных породах. Но чтобы их найти, нужен робот-исследователь, способный выдержать экстремальные условия этой части Луны. Многочисленные кратеры затрудняют передвижение, а малый угол падения солнечных лучей и толстые слои пыли затрудняют использование световых измерительных приборов. Еще одной проблемой являются сильные колебания температуры.
Европейское космическое агентство (ESA) и Европейский центр инноваций в области космических ресурсов ESRIC призвали европейские и канадские инженерные группы разработать роботов и инструменты, способные картографировать и исследовать затененную южную полярную область Луны, между кратерами Шумейкера и Фаустини. Для этого исследователям пришлось адаптировать наземные технологии исследования к суровым условиям на Луне.
Робот GLIMPSE, который похож на собаку, может передвигаться по местности полуавтономно на своих четырех ногах и полностью оснащен различными спектрометрами для распознавания типов камней.
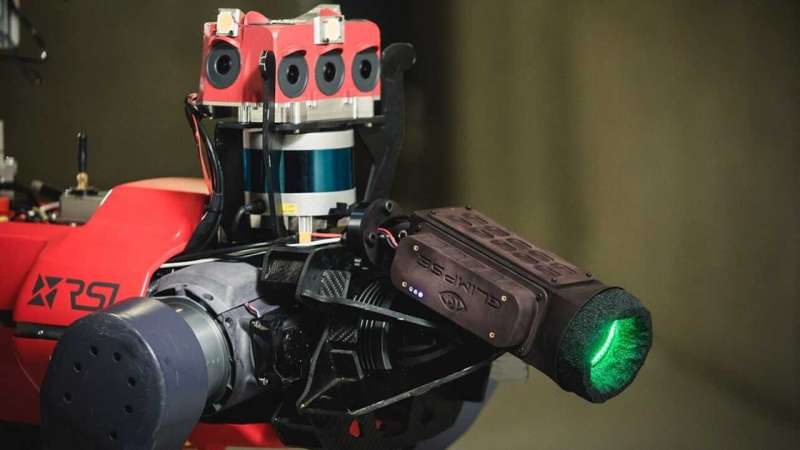
Робототехника GLIMPSE основана на типе робота ANYmal, разработанном ANYbotics, дочерней компанией ETH. Робот GLIMPSE оснащен инструментами для петрографического и химического анализа горных пород, в том числе спектрометром комбинационного рассеяния, микроскопом и камерой с зум-объективом для получения обзорных изображений и изображений крупным планом.
GLIMPSE уже успешно прошел свой первый тест. Вместе с другими роботами-исследователями он показал свои навыки навигации по искусственному лунному ландшафту, созданному специально в ангаре в Нидерландах.
У GLIMPSE было два с половиной часа, чтобы найти путь через незнакомый лунный ландшафт к определенному кратеру, где затем нужно было проанализировать камни. «После этого у нас было еще полтора часа на анализ данных», — говорит Кель. «Это были очень сжатые сроки».
У команд не было прямого обзора лунного ландшафта — навигация основывалась на записях камер роботов и данных о местоположении, сделанных так, чтобы они напоминали спутниковые изображения. Одна из сложностей заключалась в том, что сигналы управления доходили до марсоходов с временной задержкой. Для имитации реальных условий связь с роботами иногда вообще терялась. «Роботы со зрелой технологией автономного управления имели преимущество в этих обстоятельствах», — говорит Кель.