
Коллективное поведение муравьев, пчел и птиц для преодоления препятствий - это то, что исследователи используют в робототехнике. Такое поведение скопировано в небольшом многоногом роботе, напечатанном на 3D-принтере, который вскоре может найти применение в таких приложениях, как поиск выживших на местах бедствий.
Ясемин Озкан-Айдын, доцент кафедры электротехники в Университете Нотр-Дам, построил этих небольших многоногих роботов, способных маневрировать в сложных условиях и коллективно выполнять задачи, подражая своим собратьям в естественном мире. Четвероногие роботы имеют длину от 15 до 20 сантиметров и оснащены литий-полимерным аккумулятором, микроконтроллером и датчиками.
Его четыре гибкие ножки уменьшили потребность в дополнительных датчиках и деталях и дали роботам уровень машинного интеллекта, который помогал при взаимодействии с пересеченной или неровной местностью. «Вам не нужны дополнительные датчики для обнаружения препятствий, потому что гибкость ног помогает роботу проходить мимо них», - сказал Озкан-Айдын. «Они могут проверить пробелы на пути, строя мост своими телами; перемещать предметы индивидуально или соединяйтесь, чтобы перемещать объекты вместе в разных типах сред».
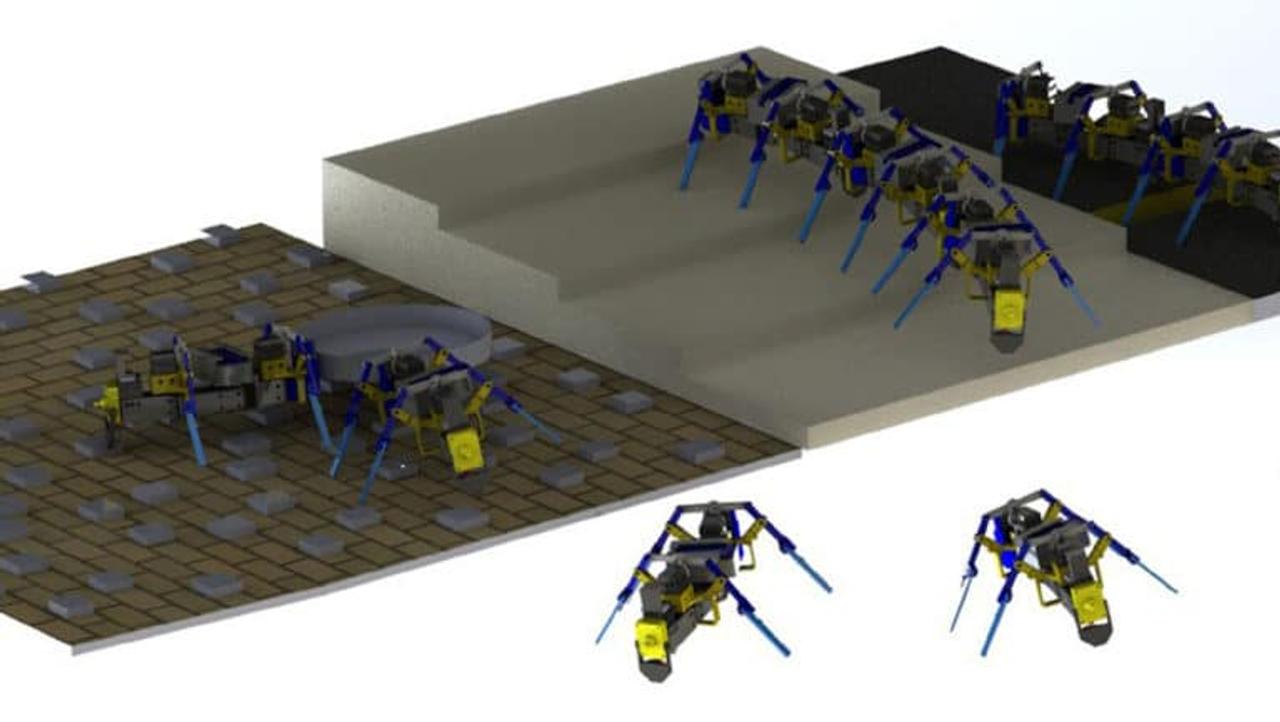
Роботы используют свои магнитные сенсорные датчики, чтобы определять свою ориентацию относительно друг друга и связывать свои тела в цепочку. Таким образом, они могут выполнять такие задачи, как преодоление промежутков, подъем по лестнице и транспортировка объектов по неровной местности, и даже могут работать вместе, чтобы нести объекты, слишком большие или тяжелые для отдельного бота.
Четвероногие роботы тестируются на траве, мульче, листьях и желудях. Их также проверяют на ворсистом ковровом покрытии, а прямоугольные деревянные блоки были приклеены к ДСП, чтобы они служили неровной местностью.
Разработчик ожидает, что результаты исследования послужат основой для создания недорогих стай роботов, которые могут адаптироваться к непредвиденным ситуациям и выполнять совместные задачи в реальном мире, такие как поисково-спасательные операции, коллективная транспортировка объектов, исследование космоса и мониторинг окружающей среды.