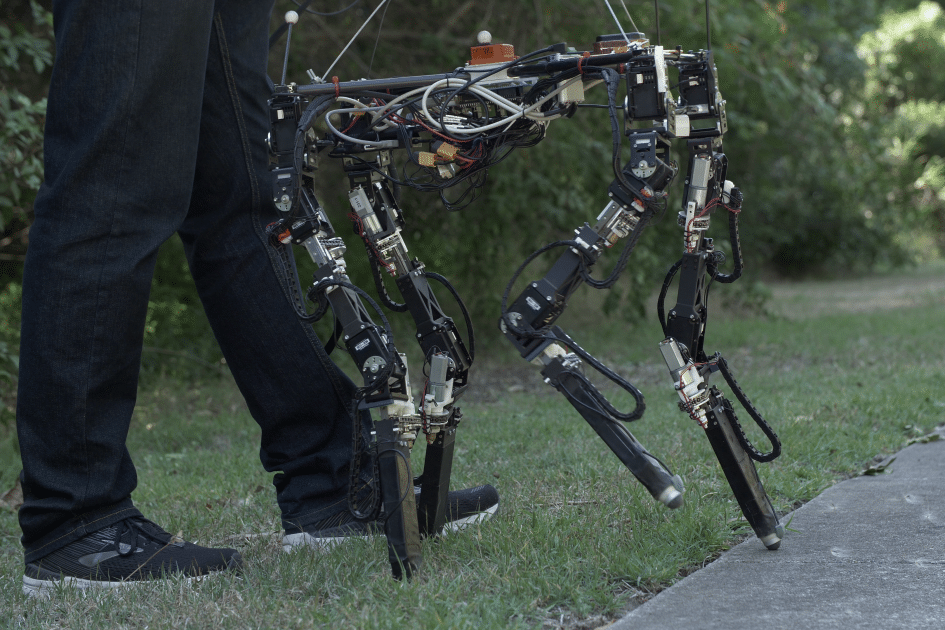
Ученые из норвежского университета Осло разработали четвероногого робота, который может регулировать длину ног, чтобы приспособить тело к любой поверхности.
Робот, получивший название DyRET, Dynamic Robot for Embodied Testing, описывается как первый четвероногий робот, который может автоматически адаптировать свою морфологию к различным условиям в неструктурированной внешней среде. Самообучающийся робот использует сочетание датчиков, камер и искусственного интеллекта для изменения формы тела, что означает, что он регулирует длину ног для конкретной поверхности.
DyRET использует камеру, чтобы увидеть, насколько неровная местность, и датчики в ногах, чтобы определить, насколько твердой является поверхность для ходьбы. «Робот постоянно узнает об окружающей среде, по которой он идет, и эти знания использует для адаптации своего тела» , - говорит ведущий исследователь Тоннес Найгаард.
Исследователи изучили с помощью DyRET два способа определения наилучшей конфигурации ног для различных ситуаций: сначала на известных поверхностях, таких как гравий, песок и бетон, а затем на траве на улице. Он быстро научился ходить по траве.
Плоский газон может быть не самой большой проблемой, но команда говорит, что трава в природе полна пучков и ям, которые могут стать ловушкой для длинноногого робота, поэтому DyRET укорачивает ноги. На бетоне может вытянуть ноги и «убежать». « Более короткие ноги обеспечивают лучшую устойчивость, в то время как более длинные ноги обеспечивают более высокую скорость ходьбы, если почва достаточно плотная», - говорит доцент Кирр Глетт.
Это полезно в средах, где робот может столкнуться с множеством неожиданных препятствий. Сюда входят поисково-спасательные операции, а также сельское хозяйство, где существует широкий спектр сложных поверхностей и погодных условий. Это также может быть полезно при исследовании шахт, куда людям трудно добраться.
«Используя нашу технологию, робот может адаптироваться к ослаблению или поломке одной из его ног. Он может научиться восстанавливаться, хромая или уменьшая длину трех других ног», - говорит Найгаард.
Команда выпустила все части проекта с открытым исходным кодом. Они также надеются, что идея о том, что можно изменить форму тела, будет полезной для других исследователей и она может быть использована в других типах роботов.